
I pop the shell off one of Dana’s Atlas SD-60Ms, remove the decoder, and clean the brush contacts, but the motor still doesn’t respond. “They ran great the last time I had ’em out,” he had told me, “but I can’t get ’em to move now. Can you take a look?”
If you’ve been into DCC for a while, you can probably guess where this is headed, but don’t shout out your answer just yet. Instead, let’s take this opportunity to explore JMRI—Java Model Railroad Interface.
Hello, DecoderPro
If you’re not yet familiar with JMRI, you ought to be. It’s an open-source software package with a variety of model railroad applications. The most popular component is DecoderPro, which is a silver bullet for configuring DCC-equipped locomotives. As is customary with open-source software, it’s free.
Sure, you can change decoder settings directly from your throttle, but it’s a hassle. The DCC standard stuffs configuration settings haphazardly into various bytes, or portions of bytes, of the decoder’s memory. You want the long address, the speed table enabled, and no analog-mode operation? Just look up the appropriate value in the table, enter it into the appropriate CV, and try it out. Soon you’ll long for the good ol’ days of setting the clock on your VCR.
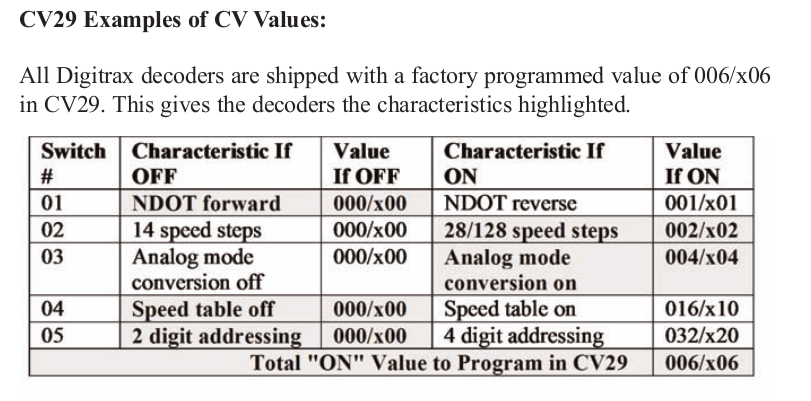
CV29 table from Digitrax’s documentation for my C-Liners’ decoders. Uh…yeah.
DecoderPro puts a friendly front end on all that. Put the locomotive on the programming track. Read in the CVs. Browse them in a window. Change things by entering new values, or clicking buttons and sliders. When you’re ready, click “write,” and the decoder is updated. Save the values for later reference.
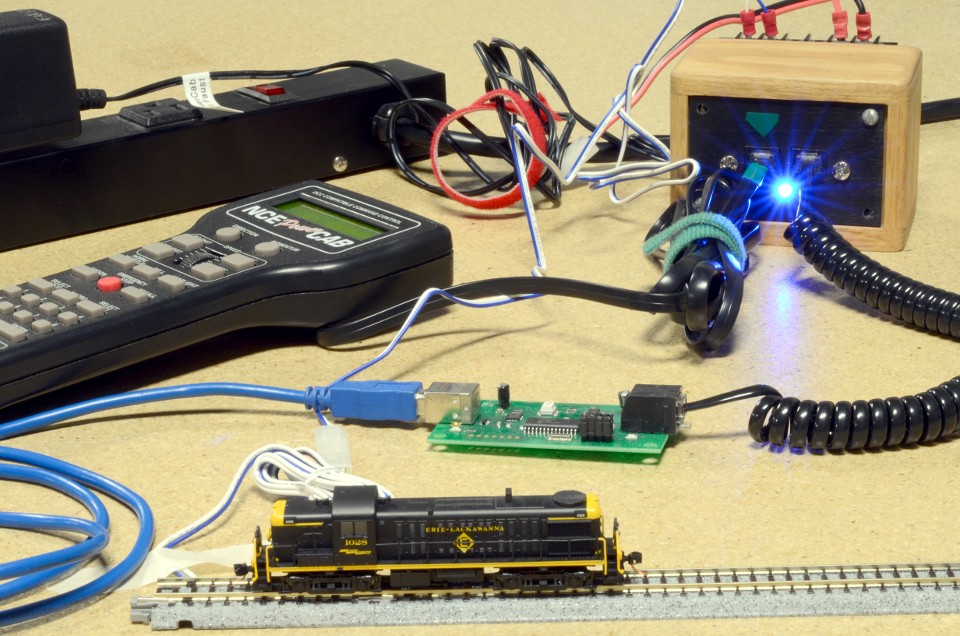
You already have a computer. You have an NCE PowerCab. What else do you need? JMRI for Windows, Mac, or Linux can be downloaded off the Web. To connect it to your PowerCab, you use NCE’s USB Interface, and a USB cable. That’s it.
I’ve been using JMRI for nearly two years now, mostly for DecoderPro. As I gradually equip my locomotive roster with decoders, it’s nice to have a good means of managing, and recording, all the various settings. I’ve been trying to speed-match the Erie Lackawanna engines; DecoderPro takes this job out of the realm of utter madness, and drags it halfway down to easy. When trouble strikes, I can see all the settings, and what they mean, in a single window.
Speaking of trouble…
So, I get out the PowerCab, and hook it up to a piece of Unitrack. The PowerCab is attached to the panel’s left-hand jack with the flat cable, just like always. (Don’t be alarmed by the look of my panel in the photo. I happen to love blue LEDs, but it’s otherwise exactly the same as yours.) Using the coiled cable, the USB Interface is connected to the other jack. A USB cable connects the interface to the computer. I get JMRI going, start a new roster entry, and have it read all the CVs from the decoder. Those values are arranged by function onto tabbed sheets, and labelled.
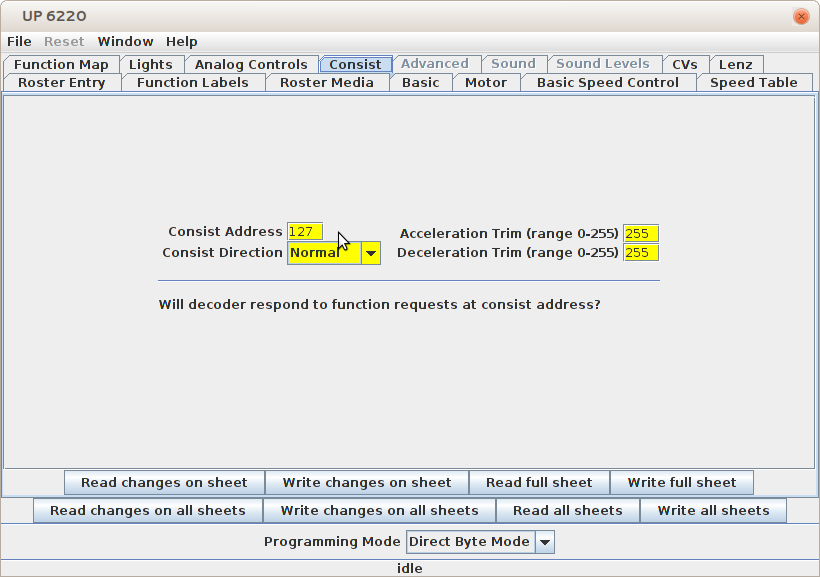
For those of you playing at home, if you guessed “the engine has been consisted,” you’re correct. As DecoderPro clearly shows, the engine is set to a consist address of 127, and will ignore its own address (6220) until the consist address has been cleared.
Well, duh. This should’ve occurred to me first thing. Of course we consisted the two engines together for a previous show. No, I didn’t need DecoderPro to tell me that, but I was about to use it anyway. I just installed a new TCS decoder in another Atlas RS-3, and with DecoderPro, I can just copy and paste the settings from the last one I installed. Man, that’s handy.
